What is a Digital temperature Controller?
Introduction to Temperature Control Systems
A temperature controller is an instrument used to control temperature calculating the difference between a setpoint and a measured temperature. The controller takes an
input from a
temperature sensor and has an output that is connected to a control element such as a
heater or fan.
To accurately control process temperature without extensive operator involvement, a temperature control system relies upon a controller,
which accepts a temperature sensor such as a
thermocouple or
RTD as input. It compares the actual temperature to the desired control temperature,
or setpoint, and provides an output to a control element. The temperature controller or thermostat is one part of the entire control system, and the whole system
should be analyzed in selecting the proper equipment.

Learn more about digital temperature controller
What Are the Different Types of temperature Controllers, and How Do They Work?
There are three basic types of controllers: on-off, proportional and PID. Depending upon the system to be controlled, the operator will be able to use one type or another to control the process.
On/Off temperature Control
How to choose the correct digital temperature controller?
- Type of input sensor (thermocouple, RTD) and
temperature range
- Type of output required (electromechanical
relay, SSR, analog output)
- Control algorithm needed (on/off, proportional,
PID)
- Number and type of outputs (heat, cool, alarm,
limit)
An on-off temperature controller is the simplest form of control device. The output from the device is either on or off, with no middle state.
An on-off control device will switch the output only when the temperature crosses the setpoint. For heating control, the output is on when the temperature is below the setpoint, and off above setpoint. Since the temperature crosses the setpoint to change the output state, the process temperature will be cycling continually, going from below setpoint to above, and back below.
In cases where this cycling occurs rapidly, and to prevent damage to contactors and valves, an on-off differential, or "hysteresis," is added to the controller operations. This differential requires that the temperature exceed setpoint by a certain amount before the output will turn off or on again. On-off differential prevents the output from "chattering" or making fast, continual switches if the cycling above and below the setpoint occurs very rapidly.
On-off temperature controller is usually used where a precise control is not necessary, in systems which cannot handle having the energy turned on and off frequently, where the mass of the system is so great that temperatures change extremely slowly, or for a temperature alarm.
One special type of on-off control used for alarm is a limit controller. This controller uses a latching relay, which must be manually reset, and is used to shut down a process when a certain temperature is reached.

Proportional temperature Control
Proportional temperature controls are designed to eliminate the cycling associated with on-off control. A proportional controller decreases the average power supplied to the heater as the temperature approaches setpoint.
This has the effect of slowing down the heater so that it will not overshoot the setpoint, but will approach the setpoint and maintain a stable temperature. This proportioning action can be accomplished by turning the output on and off for short time intervals. This "time proportioning" varies the ratio of "on" time to "off" time to control the temperature. The proportioning action occurs within a "proportional band" around the setpoint temperature. Outside this band, the controller functions as an on-off unit, with the output either fully on (below the band) or fully off (above the band). However, within the band, the output is turned on and off in the ratio of the measurement difference from the setpoint.
At the setpoint (the midpoint of the proportional band), the output on:off ratio is 1:1; that is, the on-time and off-time are equal. if the temperature is further from the setpoint, the on- and off-times vary in proportion to the temperature difference. If the temperature is below setpoint, the output will be on longer; if the temperature is too high, the output will be off longer.
PID temperature Controller
The third temperature controller type provides proportional with integral and derivative control, or PID control. This digital temperature controller combines proportional control with two additional adjustments, which helps the unit automatically compensate for changes in the system.
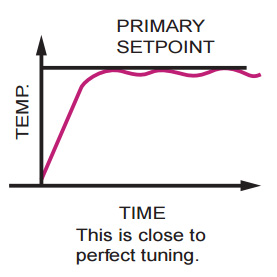
These adjustments, integral and derivative, are expressed in time-based units; they are also referred to by their reciprocals, RESET and RATE, respectively. The proportional, integral and derivative terms must be individually adjusted or "tuned" to a particular system using trial and error. It provides the most accurate and stable control of the three controller types, and is best used in systems which have a relatively small mass, those which react quickly to changes in the energy added to the process.
In this white paper, an
introduction of temperature controller PID tunning is explained.
It is recommended in systems where the load changes often and the digital controller is expected to compensate automatically due to frequent changes in setpoint, the amount of energy available, or the mass to be controlled. OMEGA offers a number of controllers that automatically tune themselves. These are known as autotune controllers.
However, nowadays
some digital controllers introduce fuzzy logic in an effort to improve performance of temperature controllers.
Choose the digital controller for your application
 On-Off temperature Controllers
On-Off temperature Controllers
On-Off controllers are the simplest type of controllers featuring on-off control action designed to provide the functionality of general
purpose PID controller but at a price suited to On/Off applications.
 Autotune PID Controllers
Autotune PID Controllers
PID controllers provide very tight control but the PID algorithm requires tuning. Autotune controllers provide that function.
 Multiloop Control systems
Multiloop Control systems
Each control loop normally consists of one input and at least one output. OMEGA offers numerous multiloop temperature controllers
which can handle more than a single control loop. OMEGA's CN1507 can handle up to 7 control loops.
 Safety Limit Controllers
Safety Limit Controllers
A safety limit controller is an off-off controller with a latching output. When the output changes state it requires a manual reset to change it back. Safety limit controllers are typically used as redundant controllers, to shut down a process when undesirable limits are reached.
 Temperature Switches
Temperature Switches
An adjustable temperature switch is suited for applications which require an economical solution to temperature control. Temperature switches are typically less complicated and easier to set up than more sophisticated electronic controls.
Frequently Asked Questions
How do temperature controller work?
To have an accurate process temperature control without extensive operator involvement, a temperature control system relies upon a controller, which accepts a sensor such as a thermocouple or RTD as input. It compares the actual temperature to the desired temperature, or setpoint, and provides an output to a control element.
The temperature controller is one part of the entire control system, and the whole system should be analyzed in selecting the proper controller. The following items should be considered when selecting a controller:
- Type of input sensor (thermocouple, RTD) and temperature range
- Type of output required (electromechanical relay, SSR, analog output)
- Control algorithm needed (on/off, proportional, PID)
- Number and type of outputs (heat, cool, alarm, limit)

What are the Different Output Types That Are Available for Controllers?
The output from the process or temperature controller may take one of several forms. The most common forms are time proportional and analog proportional. A time proportional output applies power to the load for a percentage of a fixed cycle time. For example, with a 10 second cycle time, if the controller output were set for 60%, the relay would be energized (closed, power applied) for 6 seconds, and de-energized (open, no power applied) for 4 seconds. Time proportional outputs are available in three different forms: electromechanical relay, triac or ac solid state relay, or a dc voltage pulse (to drive an external solid state relay). The electromechanical relay is generally the most economical type, and is usually chosen on systems with cycle times greater than 10 seconds, and relatively small loads.
An
ac solid state relay or dc voltage pulse are chosen for reliability, since they contain no moving parts. Recommended for processes requiring short cycle times, they need an additional relay, external to the temperature controller, to handle the typical load required by a heating element. These external solid state relays are usually used with an ac control signal for ac solid state relay output controllers, or with a dc control signal for dc voltage pulse output controllers.
An analog proportional output is usually an
analog voltage (0 to 5 Vdc) or current (4 to 20 mA). The output level from this output type is also set by the controller; if the output were set at 60%, the output level would be 60% of 5 V, or 3 V. With a 4 to 20 mA output (a 16 mA span), 60% is equal to (0.6 x 16) + 4, or 13.6 mA. These controllers are usually used with proportioning valves or power controllers.
How to select a digital temperature Controller for my application?

When you choose a temperature controller, the main considerations include the precision of control that is necessary, and how difficult the process is to control. For easiest tuning and lowest initial cost, the simplest controller which will produce the desired results should be selected.
Simple processes with a well matched heater (not overor undersized) and without rapid cycling can possibly use on-off temp controllers. For those systems subject to cycling, or with an unmatched heater (either over- or undersized), a proportional controller is needed.
PID Controllers | Related Products
↓ View this page in another language or region ↓
 CLOSE
CLOSE





 Controlador de Temperatura
Controlador de Temperatura Contrôleurs de Température
Contrôleurs de Température Reguladores de Temperatura
Reguladores de Temperatura Reguladores de Temperatura
Reguladores de Temperatura Temperature Controllers
Temperature Controllers Temperaturcontrollere
Temperaturcontrollere Régulateurs de Température
Régulateurs de Température Temperaturreglern
Temperaturreglern Regolatori di Temperatura
Regolatori di Temperatura Temperature Controllers
Temperature Controllers Controladores de Temperatura
Controladores de Temperatura Temperature Controllers
Temperature Controllers Temperature Controllers
Temperature Controllers 温度过程控制器
温度过程控制器 Temperature Controllers
Temperature Controllers
 温度コントローラー
温度コントローラー 온도 컨트롤러
온도 컨트롤러 Temperature Controllers
Temperature Controllers
 Temperature Controllers
Temperature Controllers
 Temperature Controllers
Temperature Controllers
 Temperature Controllers
Temperature Controllers
 Temperature Controllers
Temperature Controllers